Wearble Robotic Tail
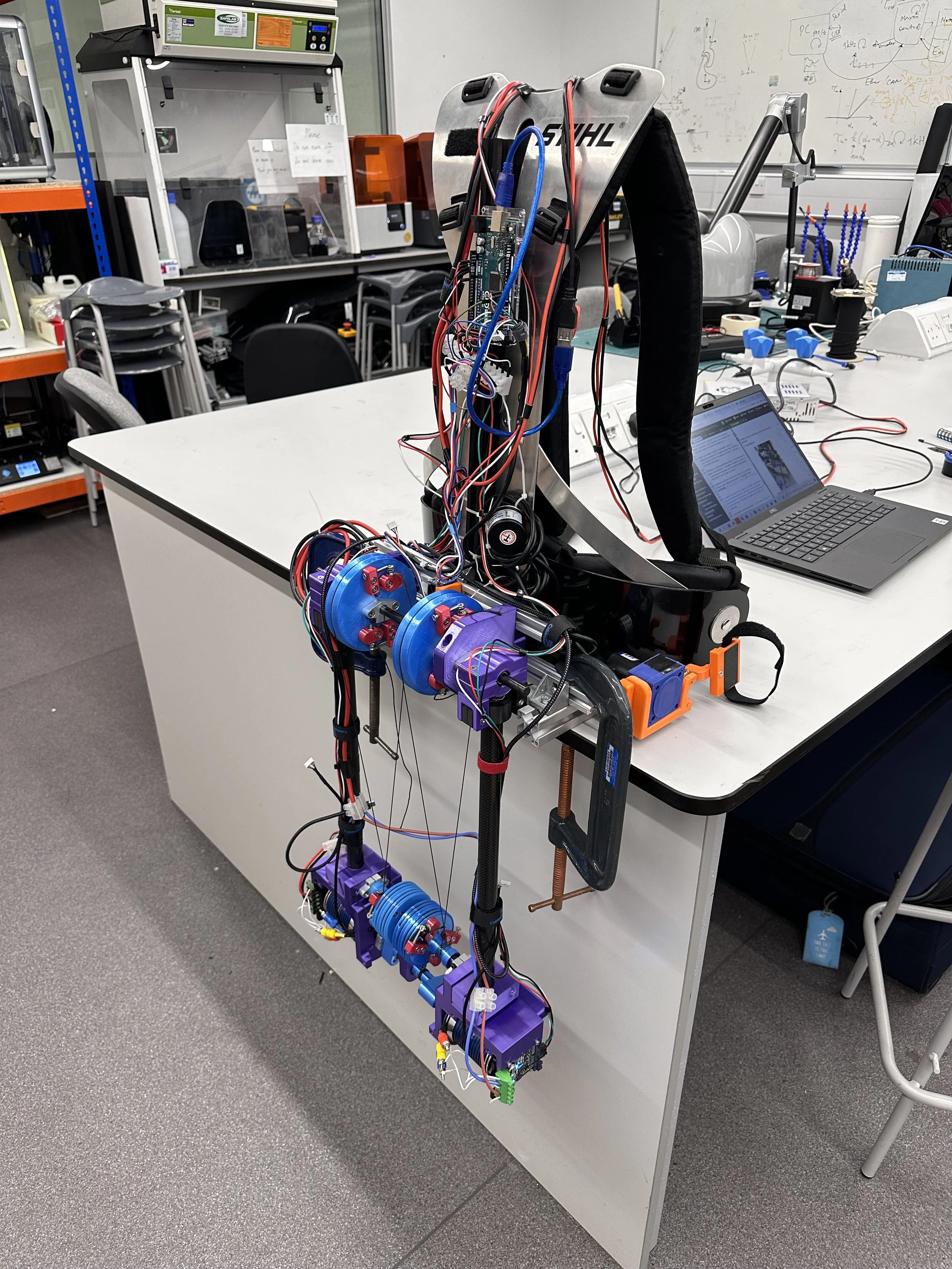



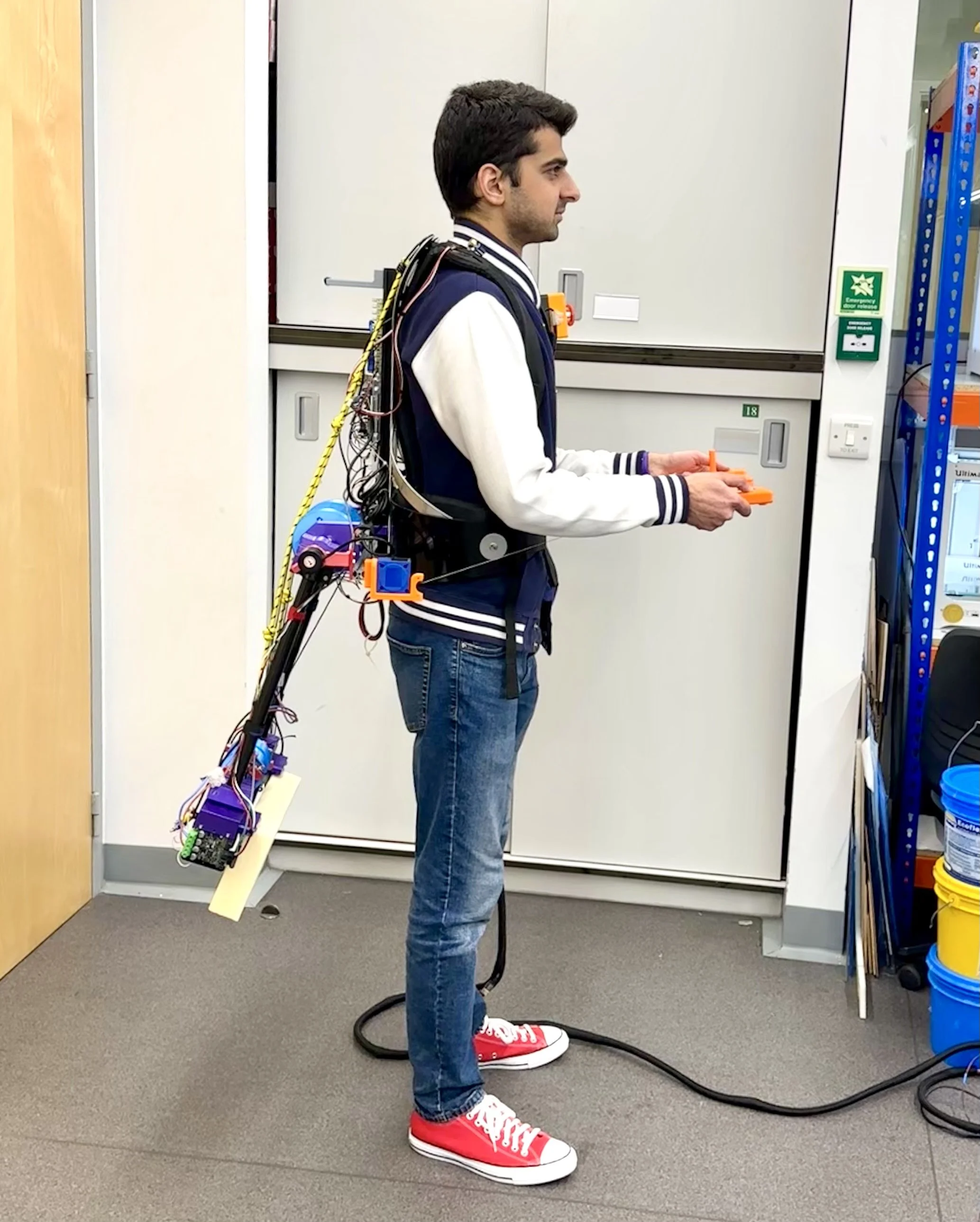
For my PhD, I modelled, designed, built, and evaluated a wearable robotic tail. For workers who regularly lift heavy items, back strain can become an issue. This partly arises due to the strain on balance that occurs when lifting something heavy in front of the body. To counterbalance this, the wearable robotic tail uses a 3 kg counterweight at its end whic it moves based on how heavy the object being lifted is, and how far it is from the body (both calculated using a custom-built hand sensor that measures these aspects). Although this means the body carries more total weight (i.e. the carried object + the tail), the tail’s weight is positioned on the pelvis using a harness designed for heavy tools, transferring the load through the leg muscles, which are stronger, and away from the back muscles, which are weaker and more prone to strain and injury.